
Walking
&
Leg Braces
Freedom Roll over SACH Step vs Walk Expectation Range
This could be a most difficult topic if we focus on minutiae. But let's look at generalities. First, let us refute very common mythology. Mankind does not walk erect BECAUSE the knees and hips are of a certain shape. Circus animals with extensive training, barely get a stumbling few erect steps going lured by a food reward. Those animals have all sorts of physical skills, even uncanny balance, but cannot really walk erect.
Then look at the hotel maintenance fellow who changes all those bulbs about 30 feet up in the air while his legs are wrapped and locked into step ladder rungs, "walking" the ladder around the room rather than climbing up and down. Given two wooden legs 30 feet high bonded together by wooden rungs, mankind can walk. Children born with no legs at all, will walk right across the room, It is a wobble sort of thing, but it is smoothly coordinated and looks like walking. There is something within us aside from legs which is the essence of walking.
Bad legs - peg legs - no legs - we can walk. It isn't the knee shape or other such archaeologist nonsense. What people have is the ability to do the math. We can solve the equation of walking with just two support points, given zero to six linkages. That is, we move the body's center of mass (that point on our body near the low belly where we would balance, level, if we were to sleep on a see-saw) through space from here to there over a ground surface which is bumpy. Think of that body mass as an airplane which needs to fly above the ground with as little turbulence as possible. Smooth flight is desired.
We are not on wheels. Just as well, as the earth can be very bumpy. On bumpy ground, legs are better than wheels if we know how to use them. Instead, sticks (legs) hold us up as we fly (step) maintaining uniform forward velocity of the body with minimal up and down displacement.
A lot of stuff has to be perceived such as body and leg segment rates of travel, estimated time to foot contact, expected landing forces and muscle reaction tensions. Adjustments need to be made quickly. Presumed actions have to be fine tuned to reality on the fly and quickly so. There is a lot of math being done and it is being fed a whole bunch of data to make it all work. Walking needs a really good computer programmed for that process, but it also needs good data. GIGO, garbage in garbage out. Sensation and perception is vital to the process. Imagine driving a car with the windows all painted black.
Tendons report back, as do muscles as to tension and acceleration deceleration, relative length and state of readiness for further alteration. Skin reports back, ground pressure and shear and stretch. Our ears report back, tilt, g-force, decelerations. Our eyes report back, where we are and what do we see coming up. Memory kibitzes, last time earth looked like that it was soft and gave way. Walking draws heavily on expectation and makes advance plans to deal with the expected. We have strategies for the unexpected as well. That is a lot of stuff, but it is all part of the process.
But that's not all. We are very efficient at what we do. We are not gas guzzlers. It is amazing how little energy we use to walk. In fact, the low use of energy is so amazing as to warrant making that the deciding factor in defining what really IS called walking, and not hobbling, or stumbling, or striving, or plodding, stomping, tripping, skipping, slipping or cavorting.
For our purposes, we can just go with three distinctions:
1. Can't
2. Can walk
3. Can step
Most of the beasts of the earth can't walk on two legs. Many persons with certain skills impaired can't walk nor step. The real question is what is walking versus what is stepping?
Stepping is just what it says. One step followed by another. Left, right, left, right as discrete disconnected events. The graduation march - dahhhh dunt dunt dunt dahhh dahhhhhhhhhh, one dreary step at a time. The feature is that energy used in producing each step is NOT conserved and recycled into the next step. It is start-stop traffic. It is VERY energy wasting.
Walking is walking when the energy used to move one leg is transferred to the body's forward motion and on into the other leg for that leg's motion. In short it is a child riding on a swing. Back and forth and back and forth. New significant energy is needed to get it going, then just minimal to keep it going. Imagine if the swing stopped cold with every cycle. Gad! That would be tiring! Indeed, stepping is tiring, for it is the same thing.
Inman
Post war veterans needing prosthetics drove the research of Verne Inman. His 'Determinants of Gait' were and still are superb insights based on great measurement and insightful math.
The essence of his studies was that the PURPOSE of how we are built (there is one built in) is to keep the center of mass (where we balance when lying down on a see-saw) moving level and at even speed when going from place 'A' to place 'B'. We do not succeed at dead flat travel (as a wheel chair might), but come close with a very low sine wave. So if a scratch on your car is level and not sine wave it wasn't from somebody walking by. It was the car itself or somebody on wheels. Small rises in sine wave height cost large amounts of energy. It is a very finely tuned mechanism. The legs behave like pendulums.
Parts of the walking mechanism provide length of stride while others even out the rises & falls that might occur vaulting over sticks. The knee & hip do the biggest part of grabbing distance while subtle pelvic & foot-ankle motions act like capacitors allowing lesser height, and less impact. The foot contributes much but is key in reducing initial ground impact effects.
Was there a flaw in Inman's work? Of course. There's a flaw in every and anything good people do. He had a target. Neurologically intact people with missing parts. Replace those parts. Do it within the scope of how things work. Example, simple trap: Make really really light weight? Well, a nerf ball is just like that. Not enough mass to handle the energy required. So the limb must fit human proportions in weight and pendulum properties. One light weight leg cannot handle the energy the good sides passes to it.
That said, swing phase is a given. Built right, it swings like a linked pendulum. Period.
But does it? Well for Inman's patients, yes. But neurologically impaired patients who are not missing parts and whose muscles thwart free swing? A big problem. The whole shebang that Inman's work flows from might be absent, or working differently. We cannot just recite Inman for the neurologically impaired population. We need to look closer at the energy thing. And where Inman was stance phase intensive we need to really look closer at swing phase. It isn't for free. And further more it might not be neurologically watched and guided.
Energy conservation is still the main target of intervention, but simple physics isn't the lone player in this difficult game.
How does it work? How do we recycle energy? The legs are pendulums, actually linked pendulums. Walking is efficient to the degree that we go with the flow - the flow of our pendulum structure. That means that we have an ideal rate, like a metronome. To go faster we need to change the pendulum (push and pull it ). It costs energy to go faster or to go slower than the ideal rate. Going slower has more time to replenish muscles with fuel and wash out the by products of metabolism, so slower does not generate the sensation of fatigue. Yet going from A to B 5% faster or 5% slower is equally inefficient.
How bad can the efficiency factor be? Well, just making one leg unable to bend at the knee (creating a long pendulum of slow period) requires that the other leg match it (if they are to get to the same place attached to the same body). That means decelerating the other leg. That alone requires about the same energy as a slow run.
This is important. Many impaired children "can walk" but "won't walk" because they are walking with SOMEBODY ELSE. That somebody else sets THE pace. That pace is the killer. The child's pendulum cannot be driven any way nor any how at that set pace. Not for long.
If central nervous system problems deprive the person of the needed sensory cues, we cannot time the foot placement for efficiency nor security. Real walking is NOT stable. There is no instant in walking when we are stable. Freeze it at any point and we would fall if left that way. The movements and postures of walking produce and depend on MOMENTUM. Walking slower than our optimum requires more stabilizing, more shifting our weight step by step over our alternating feet. When we walk out of the movies, slowly, we slam the people near us because we are swaying. We are getting more stable over the left foot and then more stable over the right foot and so on. We are, in fact, stepping, not walking.
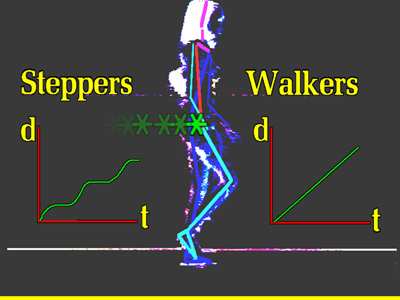 For walkers, a graph of forward motion against
time forms a straight progressing line.
For walkers, a graph of forward motion against
time forms a straight progressing line.
If progression halts, then that line forms STEPS - hence "stepper". Progression is not uniform nor is there necessarily cooperative leg interaction. There may well be a right process and a left process, each with certain peculiar characteristics. The only connection dictated is that the two legs have to wind up wherever the body winds up.
Stepping all day long invites an energy reprieve. Wheelchairs fit that need. However, we can accept that maybe a certain person just can't do the math or get the data or get it fast enough. But can we make stepping more efficient for those with no second option other than sitting?
Yes. Stepping, not using momentum, is tortured by the unstable postures required of walking. It is insult on injury, to force walking postures on a stepper. Steppers need islands of stability - like stepping across a stream on stones. It helps to be stable on each stone, not to have to do work to just stay up when stopped. Energy free at rest is an essential. A crouched posture requires muscle action to just stay put. Crouch is lethal to effective stepping.
Therefore we must know what it is we want when we brace children or adults - walking or stepping. Walking braces are shaped to not impede the transitions (from stance to swing) and to not be too stable. Stable bracing is death to walking. It is an anchor.
 |
Steppers need to be stable on each step, but not so locked as to make unloading the foot difficult for initiating another step, whenever that is.
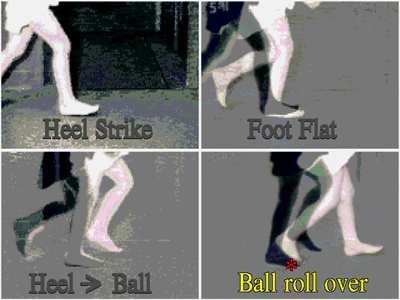
The complex motion of the foot is primarily like the foot of a tripod, it quickly adapts to the ground contours
. Very little of that motion is essential to walking, per se. Let's look at a very clear example.
These are two subjects, the upper one a man the other a teenage girl. Both are wearing lower leg casts that have their feet pointing steeply downward. Ti-pi-toe posture.
Neither of them could walk like that. Standing, which was difficult and unsteady, thrust their legs backward. It required the subjects to bend forward at the hips to keep their body mass centered over their feet.
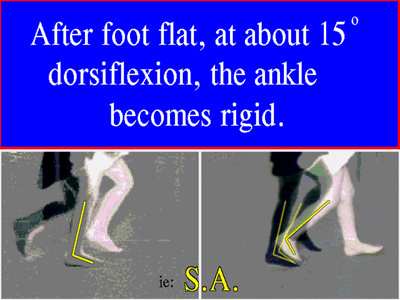
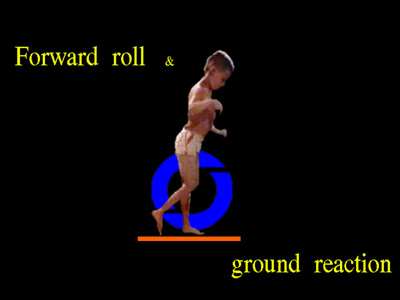
Of course, ankle motion is frozen solid in these casts. But to brace for walking means that forward roll must be free and easy. Placing a wedge under the heels to tilt the shins forward (until
10 degrees off vertical), to offset the downward point of the feet, allows easy stance and also forward roll. Therefore, it ought not interfere with walking.
 You can see that when the geometry is right, a
solid ankle (SA) does not interfere with walking, running nor even too badly with jumping.
You can see that when the geometry is right, a
solid ankle (SA) does not interfere with walking, running nor even too badly with jumping.
The cushioned heel (CH) substitutes for the cushion action of foot flat on heel strike.
The man was a volunteer. We abused him terribly
with all sorts of wicked chores and trials by ordeal. We are quite certain of this.
The girl was a patient. The casts allowed her to continue playing on her basketball team in the hallowed championship game. She was the high scorer. Her team won.
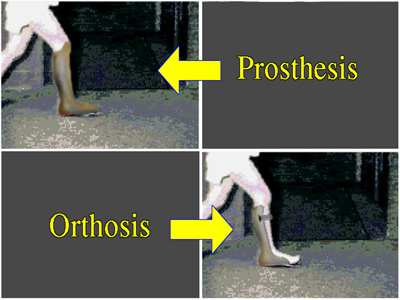
No hinges. Don't need them. In the girl's case, that would have interfered with what we were treating inside the casts. Braces are the same. Exactly. So too, prosthetics. Same mechanics. One important difference is that we can use an Allen wrench to set the prosthesis angle. When a foot is stuck pointing down or needs to be down for some reason, then we ignore the real foot and make our mechanical foot equivalent proper (using wedges beneath the foot to get the angle optimum - SA WCH or solid ankle wedged Cushion heel). See those wedges in the cast shoes above?
 |
Now consider what we might do if the native skills of the foot and ankle mechanism in any patient is lacking . The above is not too shabby. Giving freedom to a poorly controlled mechanism can't match this.
 |
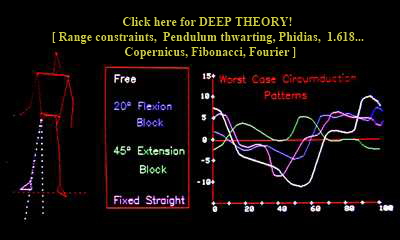
So, consider this. What if we used an ankle hinge, giving our patient "freedom" so that she would have the "ankle freedom needed to walk" (we hear that soooooooo often)? But say, she has poor foot and ankle sensory feedback so that she does not know how far forward she is tilted at the shin. She sometimes overshoots vertical by 25 degrees or occasionally falls short by 5 degrees. What happens? Bad things.
In normal walking without braces, after the foot is on the ground, the shin tilts forward progressively until it is forward the ankle and off vertical by about 10 degrees. By 15 degrees, the tightening of calf muscles renders the ankle stiff. Our flexible ankles are not flexible at midstance, they are rock solid. Our walking expects that and makes control decisions on that premise. So what happens if the ankle tilt is not consistent?
 For one thing all those control mechanisms, for
every part of the leg, based on EXPECTATION
For one thing all those control mechanisms, for
every part of the leg, based on EXPECTATION
- boom -
out the window. [More on expectation]
Each step becomes a unique adventure. She falls often, or more commonly after falling enough times decides to play it safe and use an oddball stepping mechanism that does not depend on knowing or anticipating what exactly that foot is doing at the ankle. A walker becomes a stepper.
Somebody does a walking study and reports the oddball thing she is doing. So? Let's zap that! Watch out. Walking isn't about "NORMAL", it is about success and damage avoidance. Range of motion without control is called "falling".
Stiff range of motion (incapable of instantaneous adjustment) is called "misleading", as it isn't used to do much. The range that can be tested in a therapy session might never be seen in real walking.
 |
The most important facet of walking is the supple swing of the swinging leg.
The stance leg has more robust mechanics, more backup alternatives, and better bracing options.
 |
 |
But, supple swing has no good substitute. To use a supple swinging leg the swing must be unfettered.
Accelerations of the swing leg pendulums often exceed reactive thresholds of spastic reflex arcs. Getting those arcs to NOT respond adversely to swing and quick corrections - thus to not negate the pendulum property of walking - is an art! Don't look to computers for this. They can't do that math - not yet.
T he art of preserving the pendulum of walking requires that the base (the foot) not be over stabilized
allowing easy forward rolling transition into swing. It requires that the stance leg not be weighted (stood on) too completely nor too long.
he art of preserving the pendulum of walking requires that the base (the foot) not be over stabilized
allowing easy forward rolling transition into swing. It requires that the stance leg not be weighted (stood on) too completely nor too long.
It requires that the initiation of the swing the thigh (which precedes swing the shin) not be delayed by an end stance stretch reflex.
It requires that the opposite leg adductors not reflexly recruit the swinging leg's
hamstrings (not at least until one tiny instant prior to the foot of the swinging leg lands).
It requires knowing a compensatory mechanism when present. Raw defects are seldom seen in "walking". Walking substitutes options all the time. Remember that the earth is bumpy and not flat like a computer lab floor? There are many backup plans on the ready for all sorts of problems. Watch a mother walking carrying her child on her hip and groceries in her hands while keeping the family dog from going after that cat.
Does a person with a thumb tack in the shoe scream ouch with every stride? No. That person tilts the foot off of the tack or hops. Oddities seen in walkers are usually - not rarely - compensatory mechanisms at work. The flailing arms of someone off balance is not a defect but an attempt to deal with a defect.
Beware of analyses that report deviations from normal. "Normal" means how an adult walks on a flat linoleum floor without wind or other factors. Change the surface and the normal subject deviates. Deviations that are recorded may be compensatory.
Our single most consistent difference in analysis of walking disorders is the consideration of compensatory mechanisms (Walking Theory). It would be a mistake to realign a leg to "normal" if that placed the few muscle groups having intact control mechanisms into secondary roles and reassigned the progression geometry to poorer muscle groups and mechanisms without such capability.
Some children tilt their heads because their necks are bent. Some because the horizontal muscles of the eyes that converge and diverge (prevent double vision) are faulty. So they use the next best set, the obliques. Fix the neck? No. The eyes, if possible.